-

-
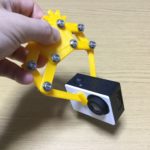
ロボットハンド自作4号(並行リンク型グリッパー設計・製作)
ロボットハンド3号を改良し、4号を作ります。 3号の機構が複雑で重い、関節の摩擦が大きくて固いという課題を解決する機構を検討します。
-
-
ロボットハンド自作3号(並行リンク型グリッパー設計・製作)
前回作ったグリッパー(ロボットハンド)を作ります。
ナットが落ちる・ガタが大きいという課題を解決していきます
-

-
ロボットハンド自作2号②(並行リンク型グリッパー製作)
前回に続き、より高度なグリッパー(ロボットハンド)を作ります。
リンク機構+歯車の部品を3Dプリンタで作って組み立てます。
-

-
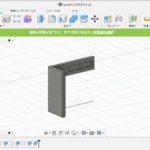
ロボットハンド自作2号①(並行リンク型グリッパー設計)
より高度なグリッパー(ロボットハンド)の設計に挑戦します。前回のグリッパーの課題を分析し、改善された設計を検討します。
-

-
ロボットハンド自作1号②(クリップ型グリッパー製作)
今回は、前回の続きです。 ①グリッパーの組み立て 3Dプリンターで作ったツメ部分と、サーボモーター、ねじ類を使ってグリッパーを作ります まず、サーボモーター本体側にツメを取り付けます 次に、サーボモー ...
-
-
ロボットハンド自作1号①(クリップ型グリッパー設計)
マイコンを習熟して作ってみたいものの一つに、ロボットアームがあります。 ↓こんな感じのやつ ただ、いきなりこのレベルを作るのはムリがありすぎるので、まずはつかむ部分を作ってみようと思います。ちなみに、 ...