前回作ったロボットハンド2号なんですが、サーボモーターを組み込む前にまだまだ色々問題があります。問題点を整理して改善した3号を開発していきたいと思います。
Contents
課題整理
大きなものはこの辺ですね
- ボルトが落ちる
- 全体的にがたつきが大きい
- 可動範囲が狭い
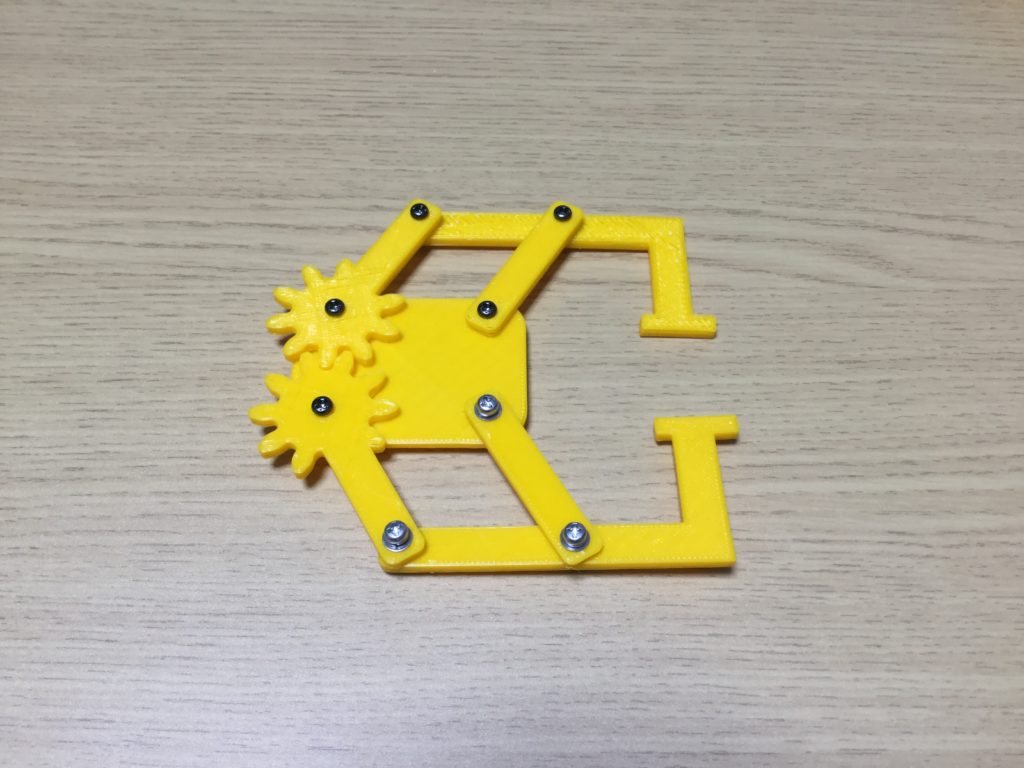
課題①:ボルトが落ちる
リンクをボルトで挟んでるだけの構造なので、動かすほどに摩擦でボルトが緩んでいき、ナットが簡単に落ちます。
課題②:全体的にがたつきが大きく、上手く掴めない
全体的にねじ止め部分のがたつきが大きいことと、部品に反りなどがあること等でハンドの先端部が上手く合いません。
そのためこのように掴もうとしてもずれてうまく保持できません。
課題③:可動範囲が狭い
こんなにでっかいくせに可動範囲が狭いです。
アームをいっぱいに開いても4cmくらいしか開きません

まあ、このロボットハンド2号は並行リンク機構を試すって意味合いが強いので、引き続き分かった問題を解決してどんどん改良していきましょう。
というわけで対策して3号を設計していきたいと思います。
課題の対策とロボットハンド3号の設計
以下の様に対策案を検討しました。
- ボルトが落ちる → 関節部分のボルトの付け方を見直し
- 全体的にがたつきが大きい → 先端のつかむ部分の面積を拡大
- 可動範囲が狭い→致命的じゃないので次回以降にします
詳しく説明していきます
改善点①:関節部分のボルトの付け方を見直し
元々は下の図のような構造でした。
部材をネジとナットで挟んでいる構造です。この構造だと関節が回ると回転力がネジに直接伝わってどんどん緩んでいきます。
ちなみにワッシャを挟んでみてもあまり結果は変わりませんでした

そこで、今回はネジとナットの下側(頭下って言います)部分に隙間を作るようにして、関節を回しても回転力がネジに伝わらないようにし、ネジが緩まない+関節も固くならない構造を考えました。
具体的には、下の図のような機構です。

改善点②:先端のつかむ部分の面積を拡大
がたつきが原因で掴むときに対象物に対して先端が回ってしまっていますが、おそらくぴったり合っていても面積が狭いので上手く掴めないと思います。
加えて言うと、そもそも3Dプリンタの造形精度では先端をぴったり合わせるにも限界があると思います。

そこで、今回は下の図のように先端部分に高さを付けてつかむ面積を増やす構造にしてみました。また、ツメ部分の形状を変えたりスペーサーを入れるための穴径の見直しなど、全体的なデザインを多少見直しました。

再設計部品の製作・組み立て
今回も前回同様、FUSION360で設計・データ作成し、3Dプリンターで部品製作をしました。

組み立てを行っていきます。
まずはベースにリンクを取り付けます

今回はベースを上下に挟む構成です。

内部が完成したので、次にツメ部分を取り付けていきます

完成です!

完成~動作
色々ありましたが無事ロボットハンド3号が完成しました。
使ってみた感じとしては、2号と比べると掴むのはかなり安定するようになりました。後、ネジも簡単には緩まなくなりました。
ですがちょっと動かすと固いですね。摩擦が大きいです。あとガタも大きいです。それから、やっぱ機構を複雑にしたせいで部品が増えて重いですね。
もともと3号が上手くいったらこれをベースにサーボモーターを組み込んでいくつもりでしたが、関節全体の摩擦の大きさがネックになって上手く動かなさそうです。もう少し改善が必要ですね。4号を作ることにします。