前回作ったクリップ型グリッパーは、構造は簡単なんですが色々課題がありそうです。今回は、それらの課題を解決したもっと高度なグリッパーを作りたいと思います。
①クリップ型グリッパーの課題
絵で描いて課題を洗い出してみましょう。
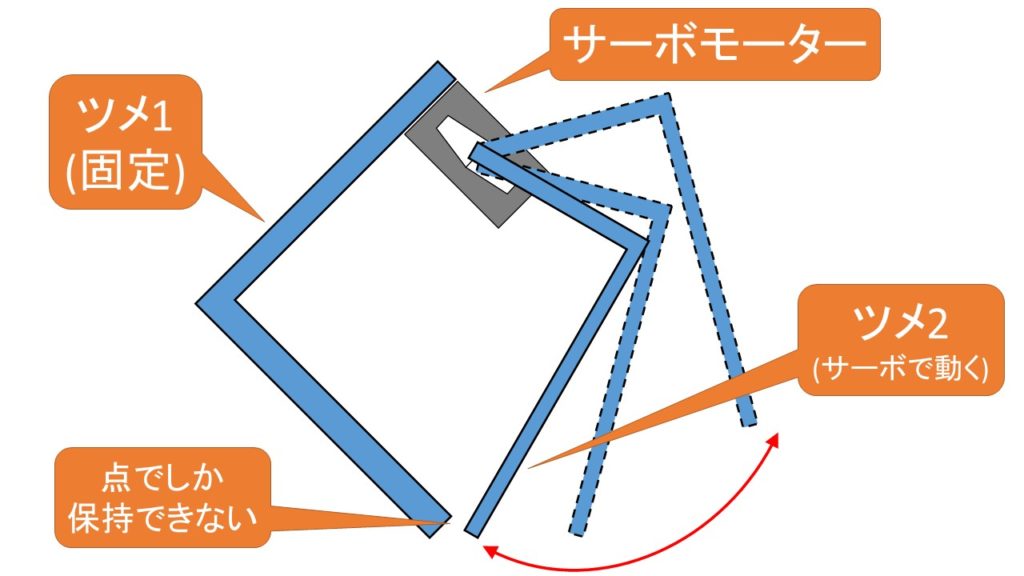
なんといっても一点でしか保持できないのがネックです。
つかむ力が弱いので、何とか改善したいところです。
保持部分を変更してみました。
保持部分を平たい板状にしてみました。
つかむ面積が増えるので保持力は高まりそうですが、開く角度に応じて左右がハの字に開いていってしまいます。この部分は平行に動いてほしいです。
加えて、サーボモーターのボディと回転軸に左右の部品をそれぞれ固定しているので、このままだと片側のハンドだけが開閉する機構になってしまいます。
これらを見直した改善版のハンドを検討してみました。
先端が平行に動く機構の検討
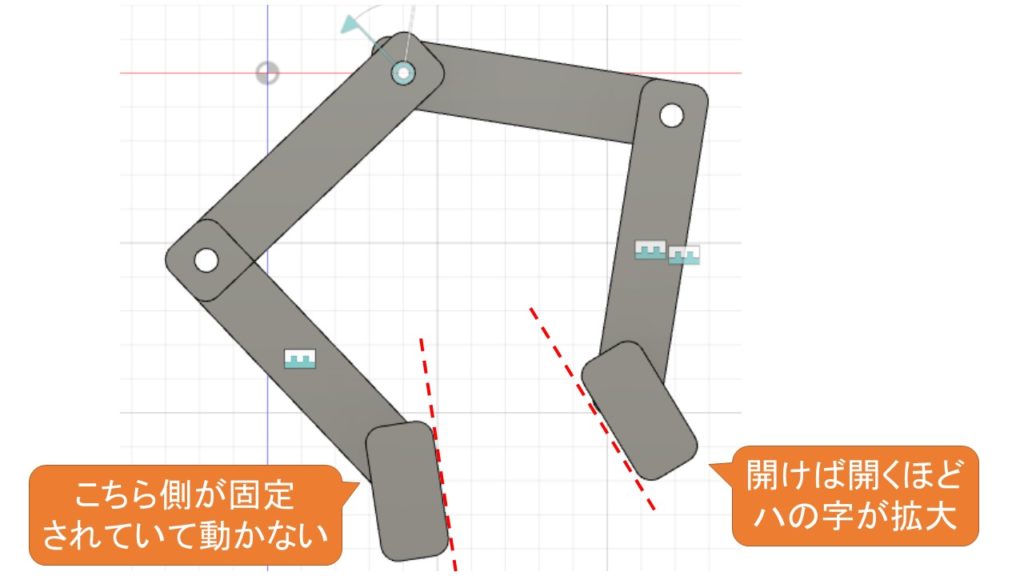
「先端部分が平行に動く」にはどうすればいいかということで、まずはどうすれば回転運動を平行運動に変換できるのかを検討してみました。具体的には下の図のような感じです。
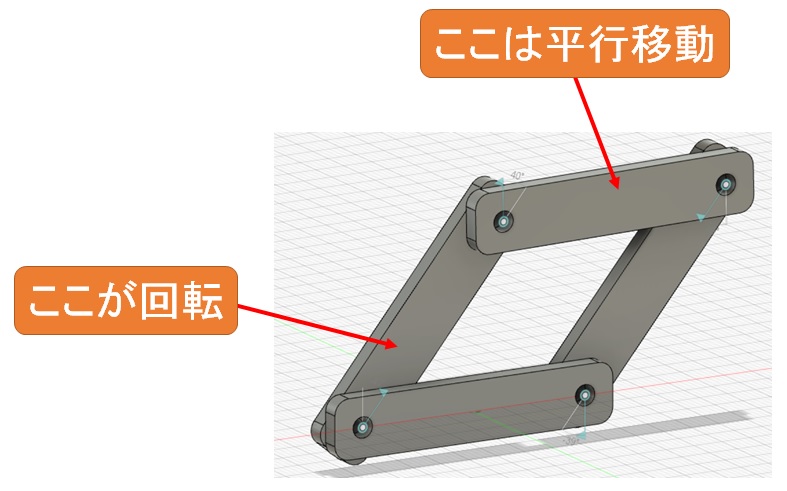
こんな感じで平行四辺形を作れば、一つの部品を回転運動させればと向かい合う辺同士は平行に動きます(後から知ったのですが、平行クランク機構とか並行リンク機構とか呼ぶらしいです)。
動かしてみれば機構がよくわかると思います。
こんな風に、図でいうと左右の部品は回転するのに対して上下の部品は平行を保った状態で動きます。
この機構を応用すれば、先端部分が平行に動くグリッパを作れそうです。
具体的には、下の図のように上側の辺を伸ばしてやればいい感じになりそうです。
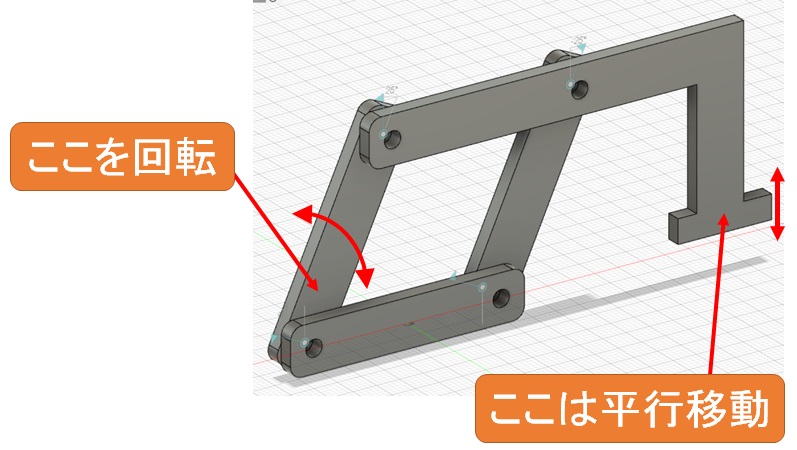
こんな感じです。動かしてみればより機構が分かりやすいです。
マウスでつかんでいる部分を回転させれば先端部分が上下に動きます。
この機構を左右(上の絵でいえば上下)対象に合わせればつかむ部分が平行に動くグリッパになりそうです。
大まかなコンセプトは固まったので、次は左右連動して動かす機構を検討してみます(次回に続きます)