マイコンを習熟して作ってみたいものの一つに、ロボットアームがあります。
↓こんな感じのやつ
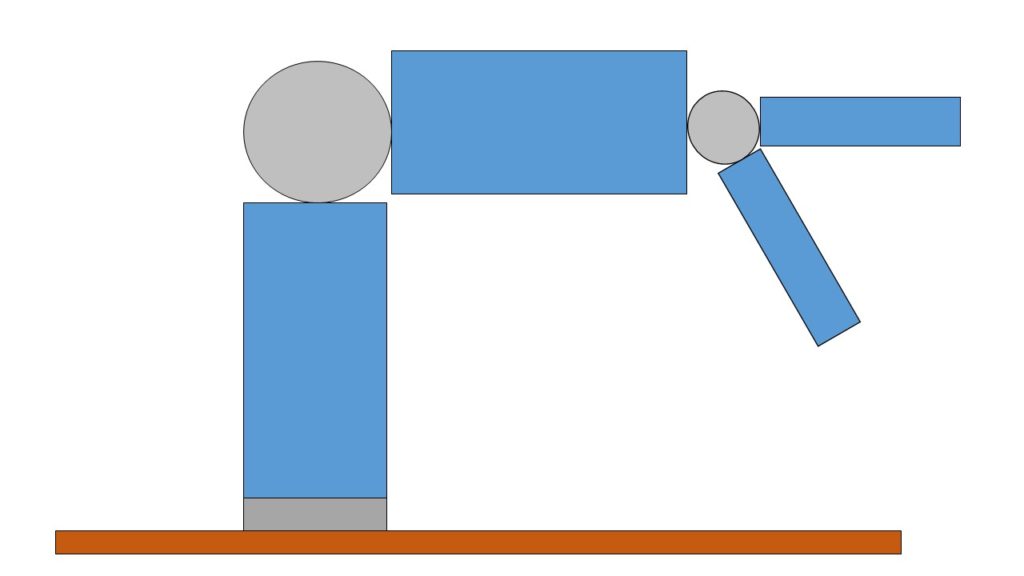
ただ、いきなりこのレベルを作るのはムリがありすぎるので、まずはつかむ部分を作ってみようと思います。
ちなみに、筆者はこの辺の知識現時点ではゼロなので、本当にゼロからの開発です。
Contents
①つかむ部分の名前
グリッパーっていうらしいです。
そういえば握ることグリップって言いますね。
②グリッパーの仕組み
グリッパーといってもいろいろあって、いわゆるツメで挟むヤツから、旋盤のチャックみたいなヤツ、人間の手みたいに複数関節あるヤツまで様々です。
色々ありますがホビー系の自作でポピュラーなのは二本のツメをサーボモーターで開いたり閉じたりする機構みたいです。
(↓こんな感じのやつ)
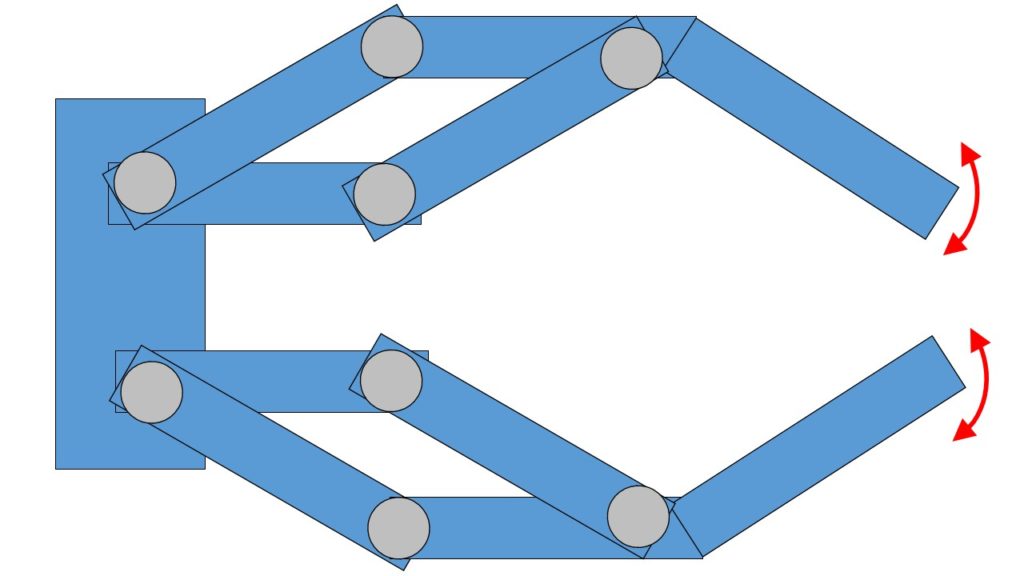
改めて書いた絵を見ると、機構をうまく理解できてない感が満載です。
どこの部分を動力で動かすのか?その力がどう伝達されてグリッパーの先端部分を動かすのか?
等々ありますが、そこはこれからおいおい勉強していこうと思います。
加えて、仮に構造を理解できたとしても製作するには知識と経験が要りそうです。まずはもっと単純な構造を検討し、それを作ってみて経験値を上げていこうと思います。
③超簡単な構造のグリッパーの検討
グリッパーの構造をもっとシンプルにできないかと考えてみたのが、以下の構造です。
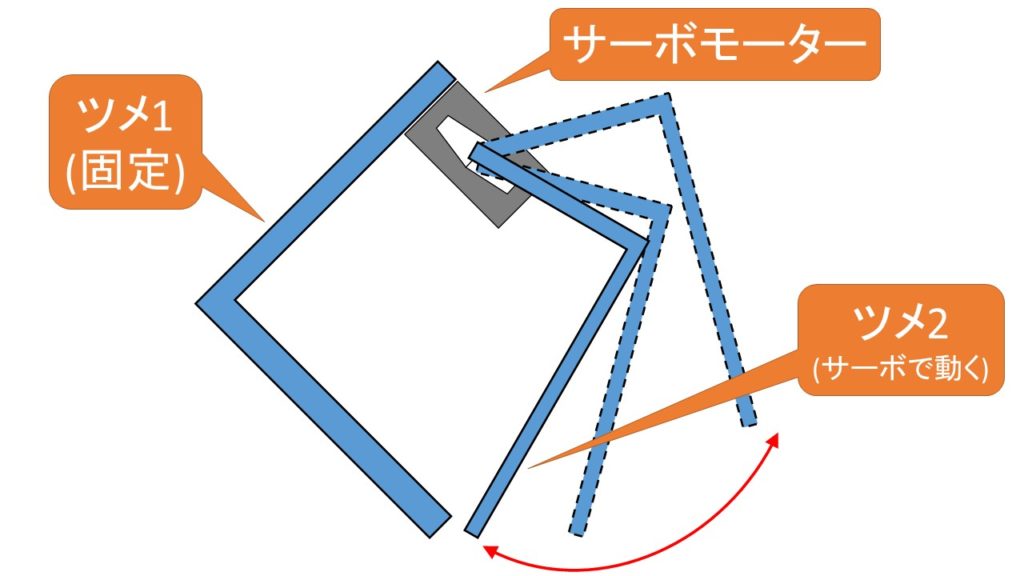
片方のツメをサーボモーターのボディに固定して、もう片方のツメをサーボモーターの回転軸にくっつけてる構造です。これなら、サーボを動かせば開閉するのでロボットハンドとして機能しそうです。
部品点数が少なく、機構も単純なのでこれなら初心者でも作れそうです。
この機構で設計してみましょう。
④3DCAD Fusion360でグリッパーの設計
グリッパー部分の設計はFusion360で行いました。Fusion360はオートデスクの3D CADです。商用CADですが、個人使用の場合は無償での使用が可能です。
導入から2週間程度で以下の図程度は書けるようになりました。
仕事でも若干のCAD経験(CATIA)はあるのでゼロベースではないですが、ネットに使い方の説明も色々あるのでかなりおすすめだと思います。

⑤3Dプリンターで印刷
作成したモデルを3Dプリンターで印刷(造形)しました。使用した3DプリンターはXYZプリンティングのダヴィンチmini w+です。

部品が完成したので、次回はこれを組み立てて動かしていこうと思います