今回は、前回の続きです。
①グリッパーの組み立て
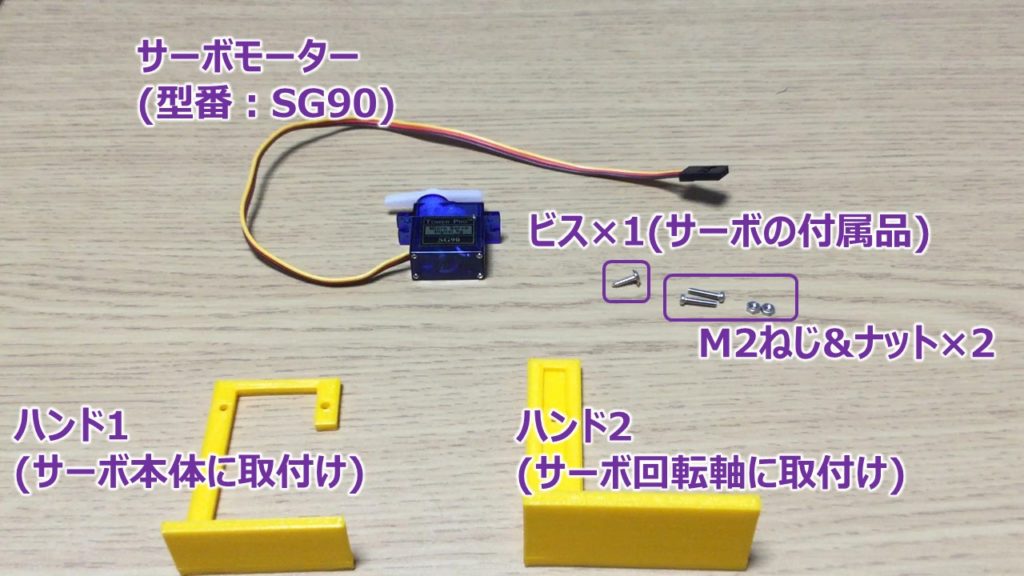
3Dプリンターで作ったツメ部分と、サーボモーター、ねじ類を使ってグリッパーを作ります
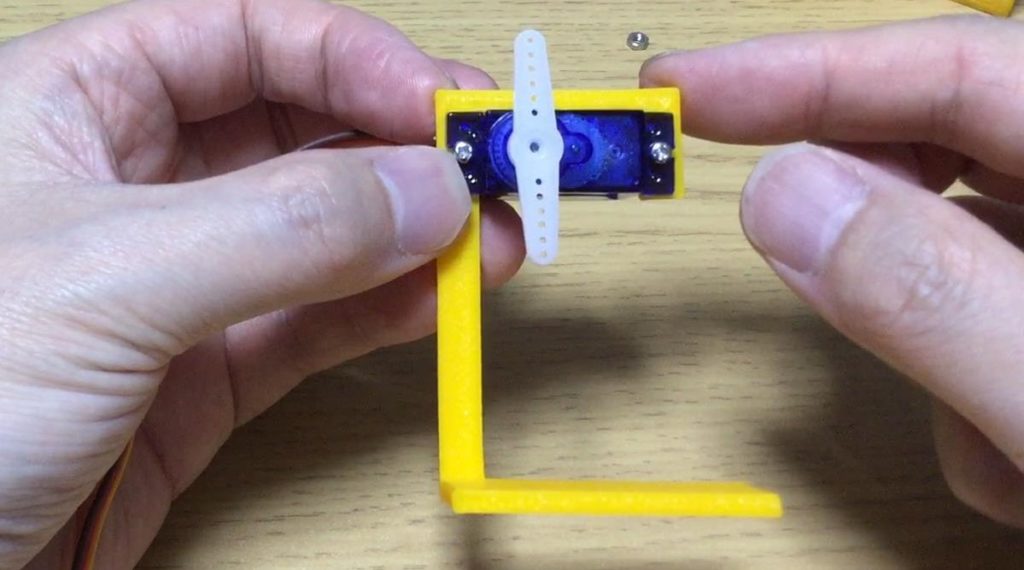
まず、サーボモーター本体側にツメを取り付けます

次に、サーボモーターの回転軸側にモーター付属のビスでツメを固定します
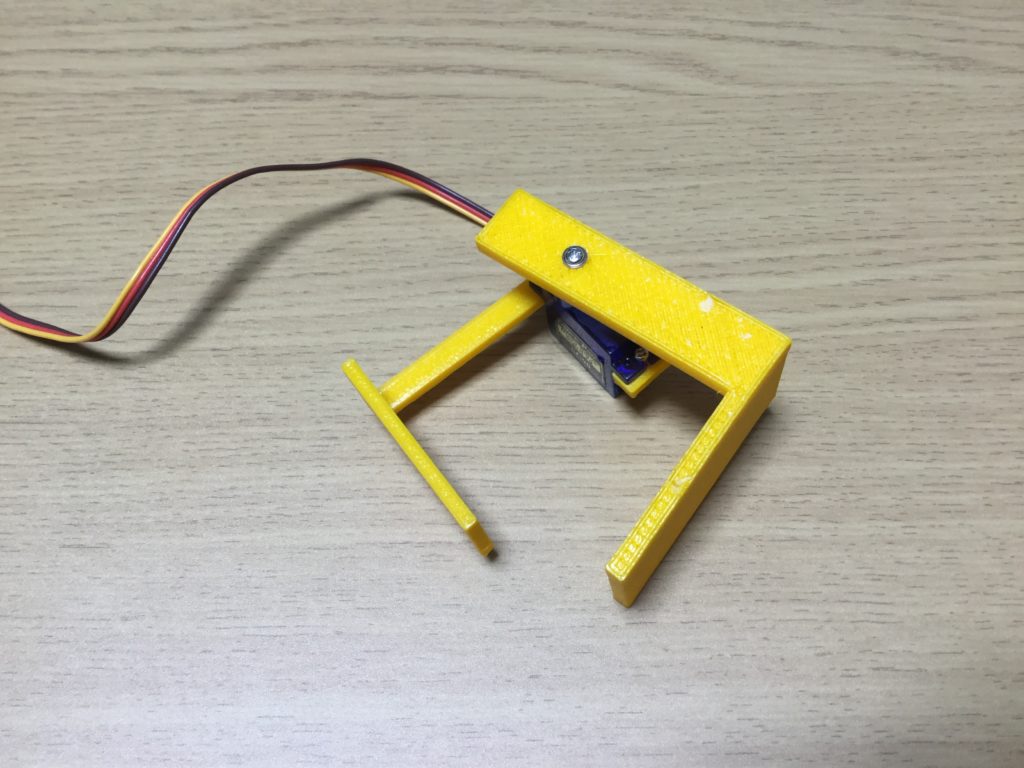
グリッパーはこれで完成です
次に、マイコンに接続してサーボを制御するプログラムを組み込めば完成です
②回路組み立て
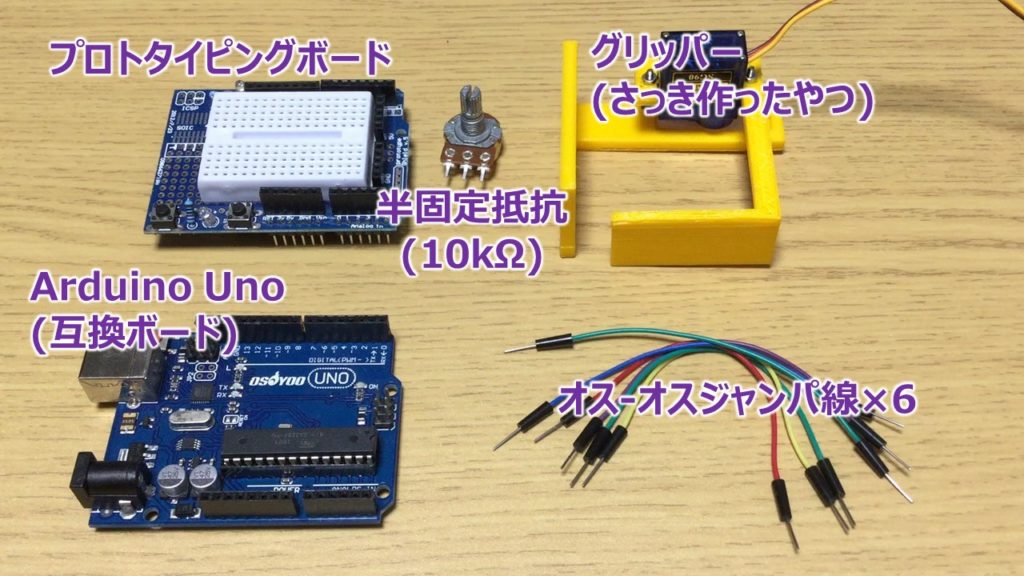
使用する部品一式はこちらになります
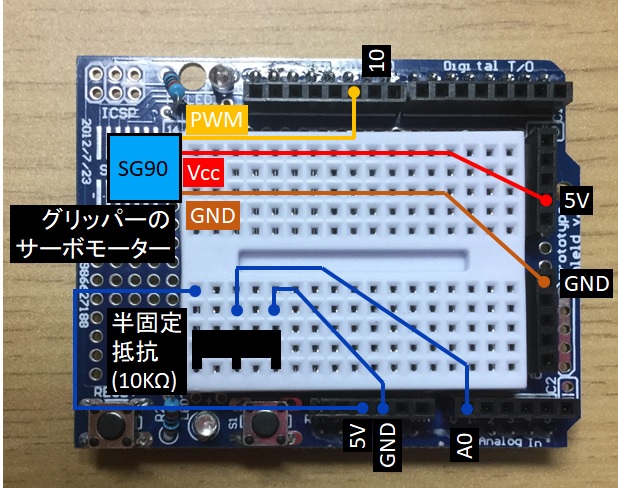
回路図はこんな感じになります。
半固定抵抗を回すことで、A0への入力電圧を変化させ、それに合わせてサーボの角度を変更させるスケッチにすることでグリッパを開閉させることができます。
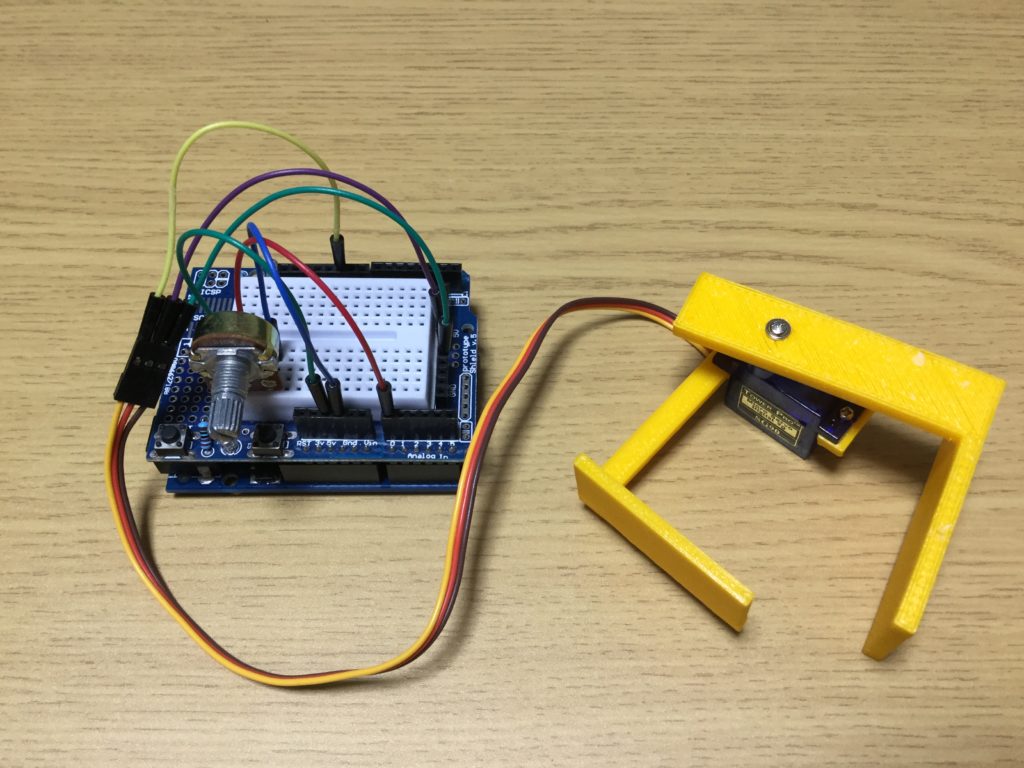
組み立て後はこのようになります
(組み立てる途中で、重大なミスをしてしまいました。詳しくはこちら)
③スケッチ
スケッチはこんな感じです
#include <Servo.h>
Servo servo1;
void setup()
{
servo1.attach(10);
}
void loop(){
int val;
val = analogRead(0);
int ang;
ang = (int)(val*0.175);
servo1.write(ang);
delay(10);
}割とシンプルなコードですね。
A0の電圧を読み取って、電圧の値に合わせてサーボの角度を設定しています。これで、半固定抵抗のツマミを回すことでロボットハンドを動かすことができます。
④コンパイル~実行
完成したらこんな感じです
ツマミを回してアームを開閉させ、物をつかむことが出来るようになりました。
使用した主要な部品
サーボモーター
マイコン(入門キットを使用していますArduion、可変抵抗、ジャンパ線はこのキットにすべて入っていました)